Adaptive Control • Perception • Mechatronics
Designing reliable autonomy through control theory and real robots
Explore projects by interacting with the 3D nodes. Click a node to open the case study with Problem, Method, and Result.
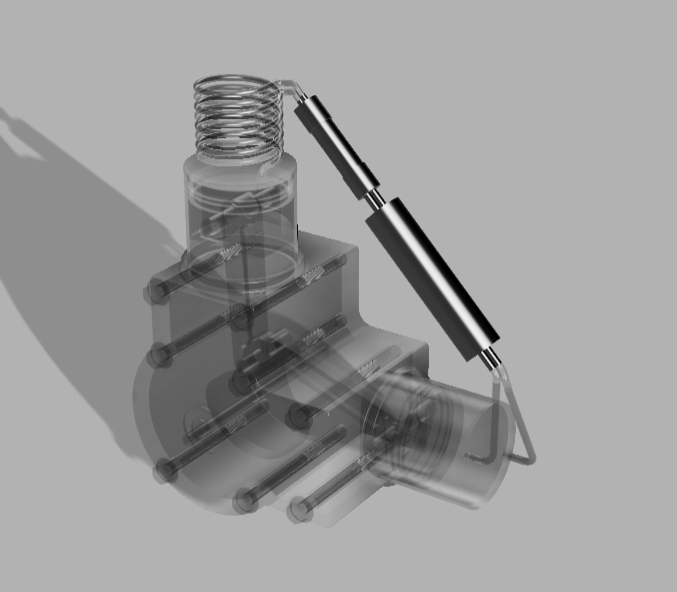
Robotic platforms needed a compact, low‑noise power source that converts external heat to mechanical work with high reliability and minimal acoustic signature.

Design a four‑axis robotic arm with accurate, smooth articulation and strong structural integrity while remaining manufacturable.
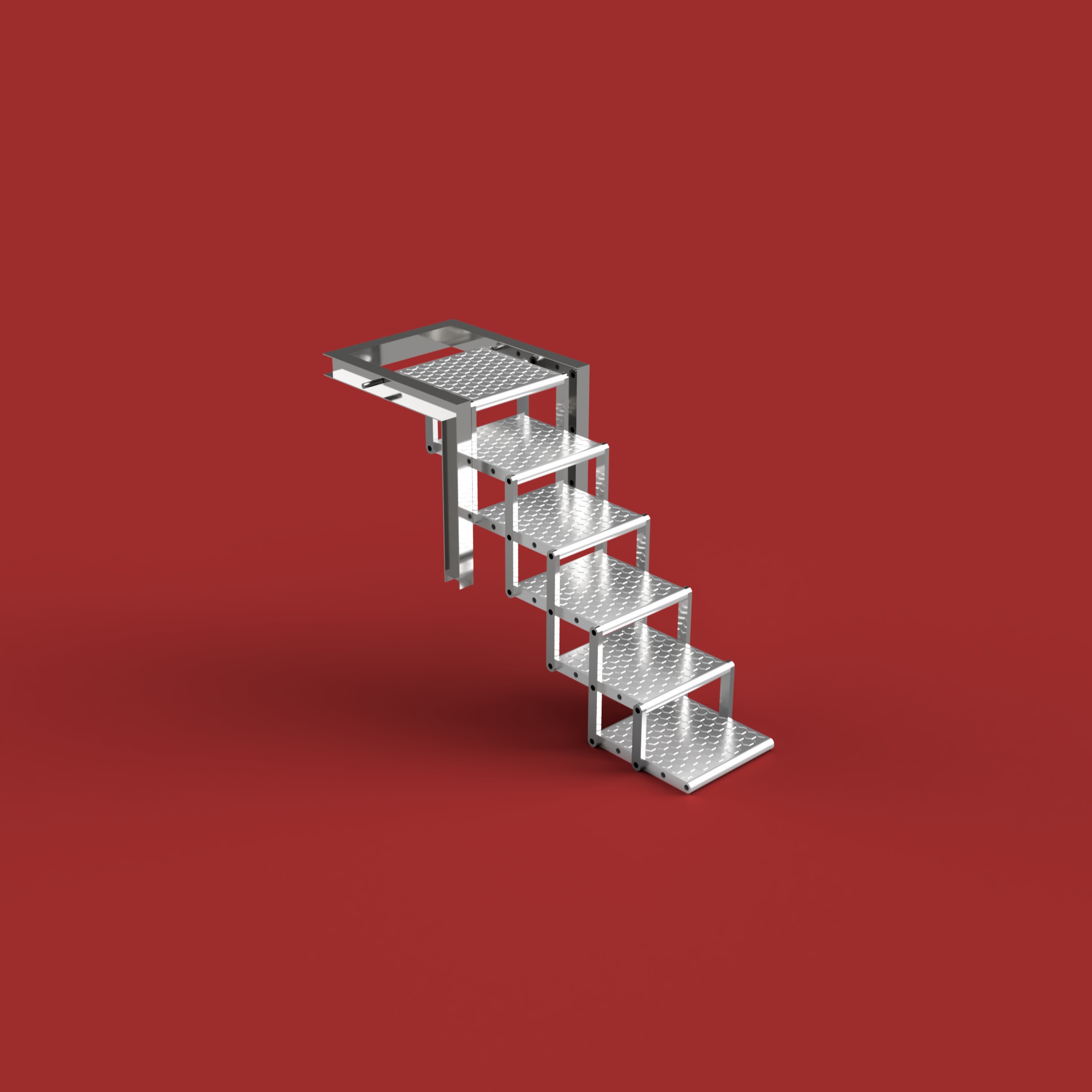
Create a staircase system that automatically adjusts height and angle to improve accessibility and space utilization in constrained environments.
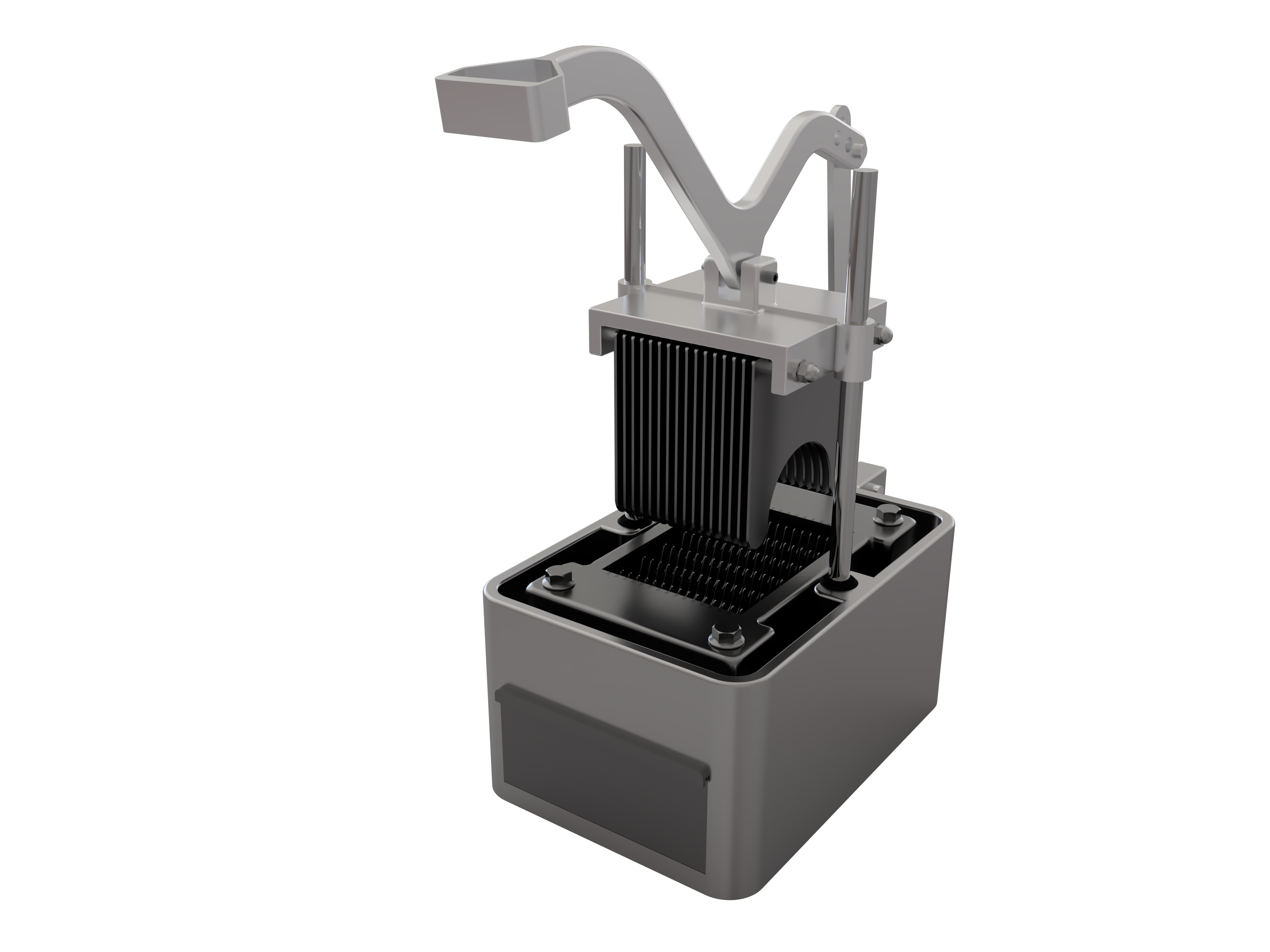
Design and develop a manually powered onion slicing system that delivers consistent slice thickness, minimizes preparation time, and reduces repetitive strain, while maintaining food safety standards for home and commercial kitchen use.